Introducing HOMIE:
Building Interactive Intelligence from
Real-World Human
Xperience
Introduction
The next leap in artificial intelligence won't happen in a digital vacuum. It requires embodied experience—the messy, 4D reality of human interaction. We are shifting from static datasets to Xperience.
By capturing human actions, intentions, and interactions at scale, HOMIE builds the human experience infrastructure that transforms real-world experience into machine-readable knowledge for physical AI.
Chapter 01 · Foundations
Human Xperience — beyond perception.
Why physical AI needs 4D data.
We use Xperience deliberately. The X stands for the many dimensions of human experience — what humans see, hear, touch, move, and interact with as they live and act in the real world.
Human Xperience is not just perception. It is perception tightly coupled with action, intention, and physical consequence — what we call 4D data: spatial structure, motion, interaction, and change over time.
To capture it faithfully, we must start from the perspective where experience originates.
Capturing Xperience from the egocentric perspective
If we want AI systems that understand and operate in the physical world, we must teach them from the viewpoint that best reflects real human behavior: the egocentric perspective.
From the egocentric perspective, human experience naturally includes:
- Rich human-object interactions
- Spatial context and scene affordances
- Social signals from other people
- Fine-grained motor actions unfolding over time
This is exactly the information an intelligent system needs to learn how to move, manipulate, and reason about the physical world.
And just as importantly:
Why egocentric scales
Egocentric capture scales. A body-mounted system, without external infrastructure or environmental instrumentation, enables truly in-the-wild data collection across homes, workplaces, factories, hospitals, and beyond.
This scalability unlocks the diversity, realism, and long-tail behaviors that are critical for robust generalization in robotics and embodied AI.
Chapter 02 · The Platform
HOMIE.
A full-stack platform for in-the-wild human experience capture.
To make large-scale human Xperience capture possible, we built HOMIE (Human-centric OMni Interaction & Experience) - a full-stack hardware-software platform designed for frictionless, lossless human-centric data capture at scale and low cost.

HOMIE pairs a head-mounted sensor stack with a suite of spatial foundation models. Capture is the hardware. Structure is the software. Together they form a single engine from real-world motion to model-ready data.
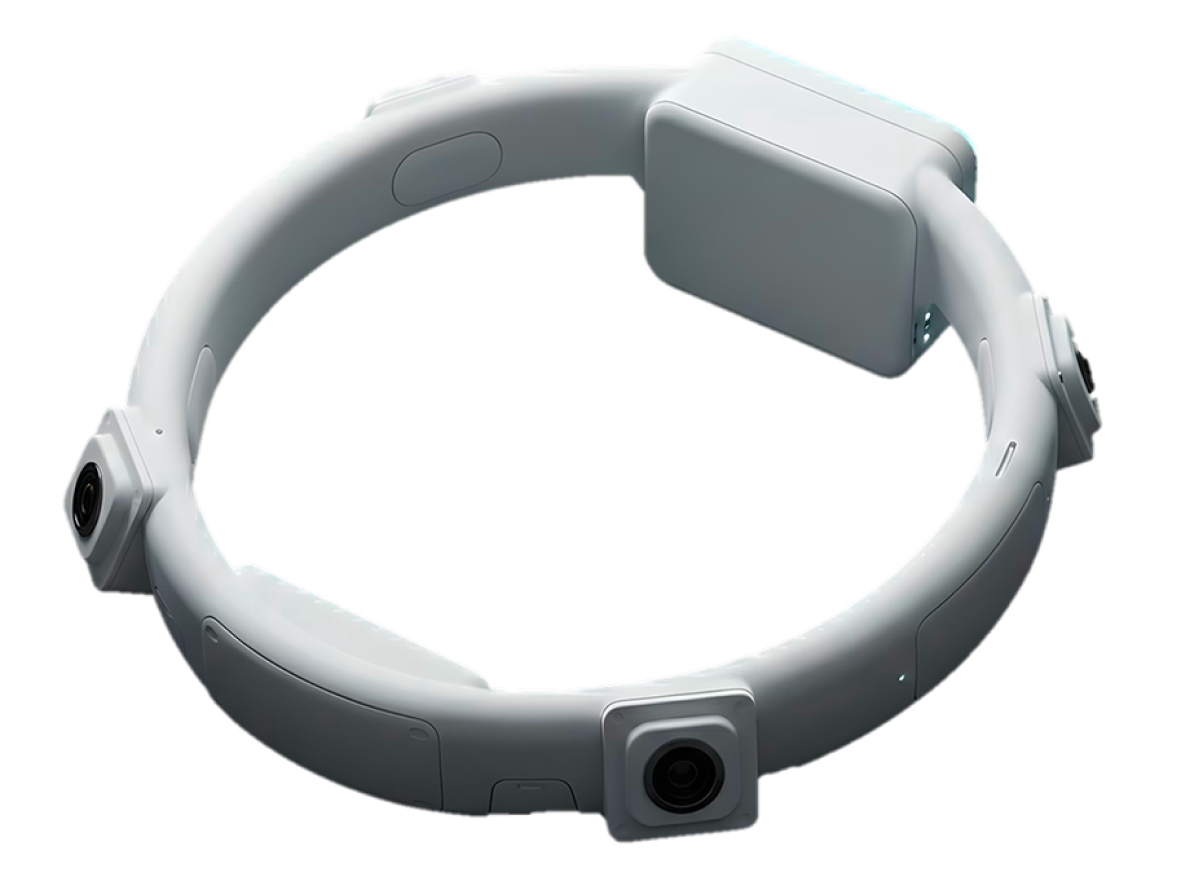
02.1Hardware - head-mounted, multi-modal egocentric data capture
HOMIE's hardware is engineered for accurate spatial understanding and long-term real-world use:
- Lightweight, ergonomic head-mounted form factor
- Multi-modal sensing for rich physical and spatial signals
- Robust ego-motion tracking and localization
- Long battery life for all-day in-the-wild capture
- Precise sensor synchronization for high-fidelity 3D reconstruction
Our goal is simple: make capturing human Xperience as natural as wearing glasses.
02.2Software - spatial foundation models for automatic annotation
Raw experience alone is not enough. Intelligence requires structure.
HOMIE includes a suite of proprietary spatial foundation models that automatically transform captured Xperience into machine-readable, model-ready annotation, including:
- Spatial localization and stereo depth estimation
- Hand-object interaction tracking
- Full-body motion capture (mocap)
- Panoramic scene perception and understanding
- ...and more to come
Together, these models convert unstructured human experience into structured interactive intelligence datasets - ready for training the next generation of world models, and embodied AI systems.
Chapter 03 · RE-LIVING THE DATA
ReXperience.
How embodied AI learns from human Xperience.
Intelligence does not emerge from passive observation alone. It emerges through ReXperience: the process by which AI systems repeatedly relive, model, and internalize human Xperience.
We see immediate impact of ReXperience across three frontier directions in physical AI:
- 01
World models - predictive intelligence from human Xperience
Egocentric human Xperience provides realistic trajectories for learning how environments evolve and how actions lead to consequences. This grounds world models in real perception and interaction, improving physical prediction and reasoning. At scale, it enables world models that generalize across diverse, unstructured real-world scenarios.
- 02
Real2Sim - better robot training simulations from human-captured reality
Simulation remains essential for robot learning, but its fidelity is fundamentally limited by the realism of its assets. Human Xperience supplies natural motion patterns, contact dynamics, and task distributions that simulations often miss. By grounding simulation in real human behavior, Real2Sim produces training environments that are more representative, diverse, and effective for robotics.
- 03
VLA models - scaling generalization through egocentric action grounding
Large-scale egocentric Xperience exposes Vision-Language-Action (VLA) models to how humans actually perceive, act, and describe tasks in real environments. This grounding leads to much stronger generalization across new tasks, instructions, and scenes. As Xperience scales, so does the model's ability to adapt and act intelligently in the open world.
Chapter 04 · Closing
Our mission.
Defining the data foundation for physical intelligence.
If we want AI that moves like us, understands like us, and helps us in everyday physical tasks, then its intelligence must be built from human experience itself. At Ropedia, we are building the data infrastructure that captures, structures, and transforms human Xperience into the foundation for physical intelligence.
Closing thought
Intelligence begins with Xperience. We're here to scale it.
// TALK TO US
Building world models,
robots, or embodied agents?
If you are building world models, robotics systems, or embodied agents and care deeply about learning from real-world human experience data we'd love to talk.
Contact Us